II-3. Vecteur vitesse :
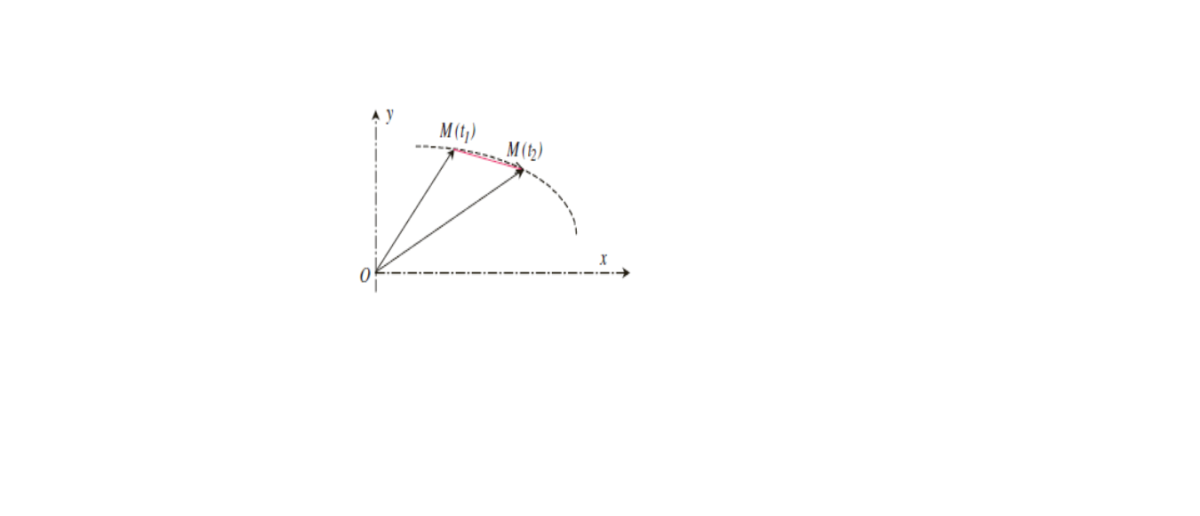
II-3.1 Vitesse moyenne :
La vitesse d'un mobile est définie comme étant la variation de sa position par rapport au temps.
Soit M la position du mobile à l'instant 𝑡1 qui correspond au point M (𝑡1) = 𝑀1 et à l'instant 𝑡2 au point M (𝑡2) = 𝑀2 avec (𝑡1 < 𝑡2). La vitesse moyenne du mobile entre les deux instants est donnée par :
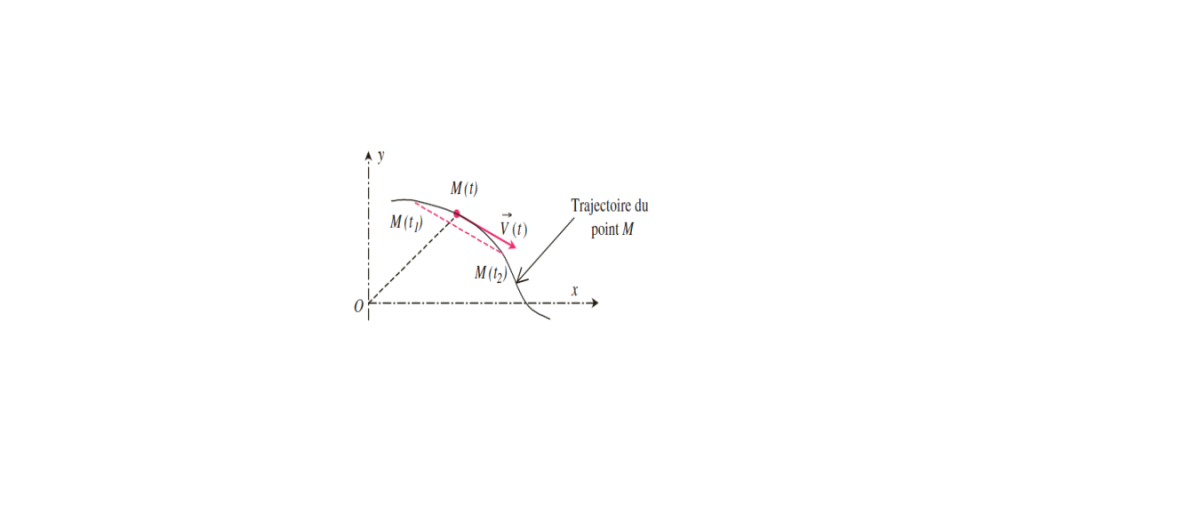
II-3.2 Vitesse instantanée :
La vitesse instantanée est définie à chaque instant pour les différentes positions du mobile au cours de son mouvement donnée par la relation suivante :
Le vecteur vitesse est toujours tangent à la trajectoire.
Dans un repère cartésien on a :