II-2. Vecteur position :
On définit la position d'un point matériel à un instant t par un vecteur 𝑂𝑀 ⃗⃗⃗⃗⃗⃗ donné par l'équation suivante :
II-2.1 Équation horaire du mouvement :
On appelle équation horaire du mouvement toute équation donnant la position du mobile sur sa trajectoire en fonction du temps.
𝑓(𝑡) = 𝑥
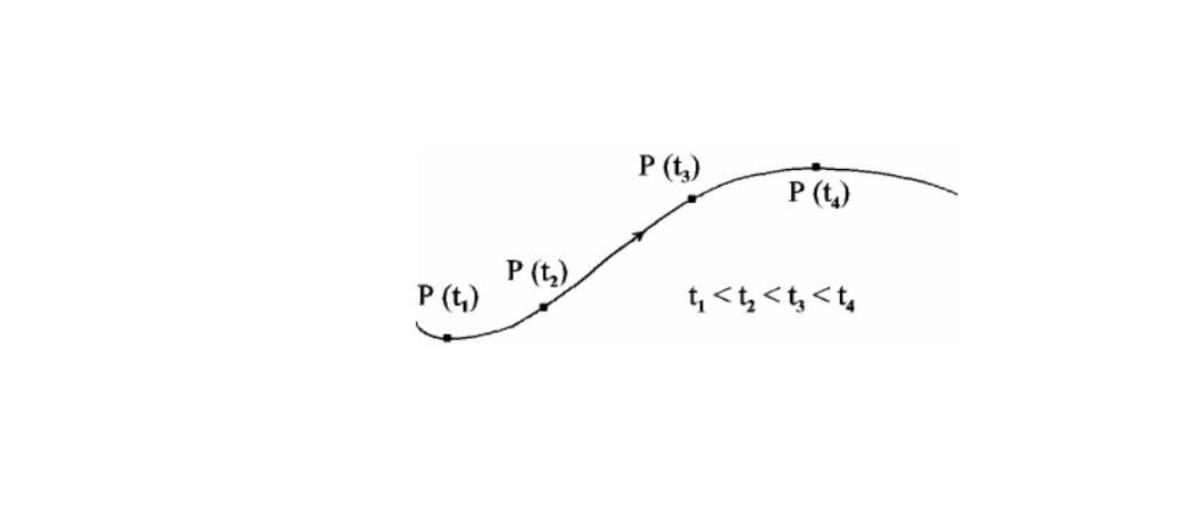
II-2-2 Trajectoire du mouvement :
une trajectoire est l'ensemble des points occupés par le mobile aux temps diffèrent et successifs (voir figure I.1). L'équation de la trajectoire est de la forme :
𝑦 = 𝑓(𝑥)
Exemple :
La position d'un mobile à l'instant est donnée par les équations suivantes :
𝑥(𝑡) = 2𝑡
𝑦(𝑡) = 0
𝑧(𝑡) = −5𝑡2 + 4𝑡
1- Quelle est la trajectoire du mobile ?
2- Donner le vecteur position à l'instant t=2s.
1-trajectoir du mobile :
𝑥 = 2𝑡 ⟹ 𝑡 = 𝑥 / 2
𝑧 = −5 (𝑥/2)2 + 4 (𝑥 / 2) = −5/4 𝑥2 + 2𝑥, la forme de l'équation est une parabole.
2-Le vecteur position :
a l'instant :