II-6. Système de coordonnées.
II-6.1. Coordonnées cartésienne
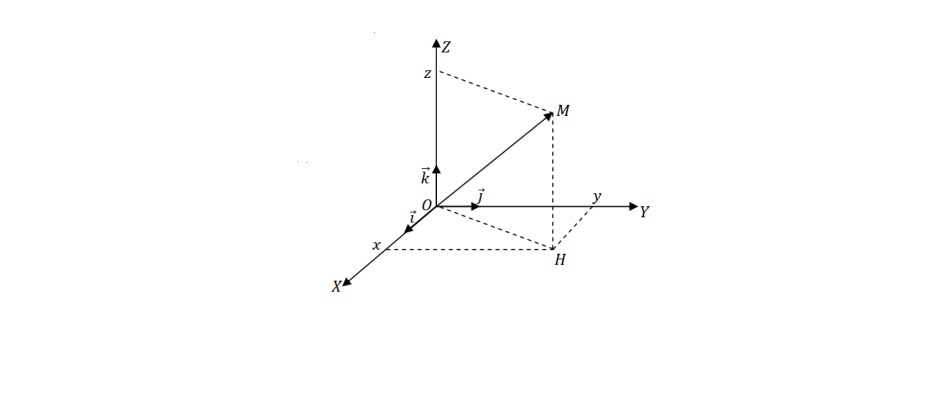
x = abscisse de M ; y = ordonnée de M ; z = côte de M.
II-6.2. Coordonnées polaires :
Un point M dans le plan (O X Y) peut être repéré par les données de ( ρ,θ ) appelées coordonnées polaires.
Pour recouvrir tout le plan : 0 ≤ ρ < +∞; 0 ≤ θ < 2π.
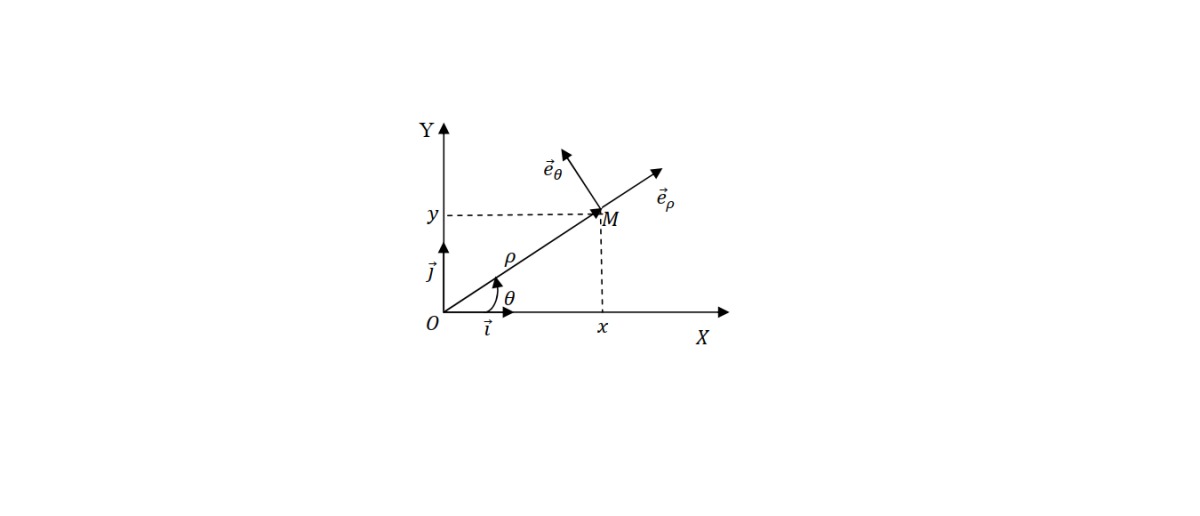
- Correspondance avec les coordonnées cartésiennes
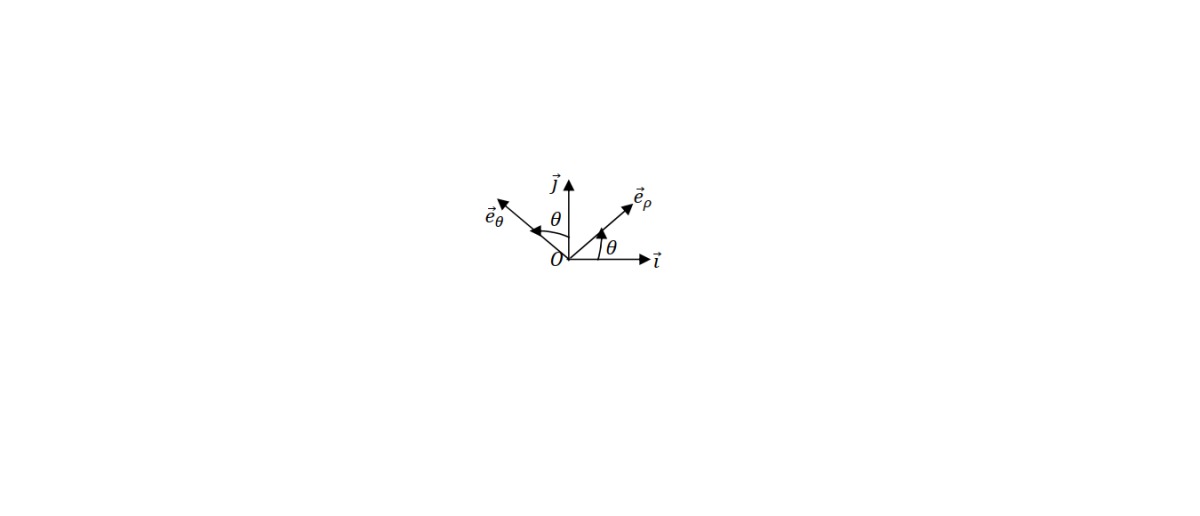
- Base locale associée aux coordonnées cylindriques :
est la base locale associée aux coordonnées cylindriques, c'est une base orthonormée directe.
Dans cette base, le vecteur position s’écrit :
- Correspondance avec les coordonnées cartésiennes
II- 6.3. Coordonnées cylindriques :
Soit H la projection de M sur le plan (OXY)
Le point M est repéré par :
ρ la distance PM ou encore OH;
( ρ, θ, z) sont les coordonnées cylindriques du point M.
ρ est appelé rayon polaire; θ est l'angle polaire et z la cote.
Pour recouvrir tout l'espace : 0 ≤ ρ < +∞; 0 ≤θ < 2π ; –∞ <z< +∞.
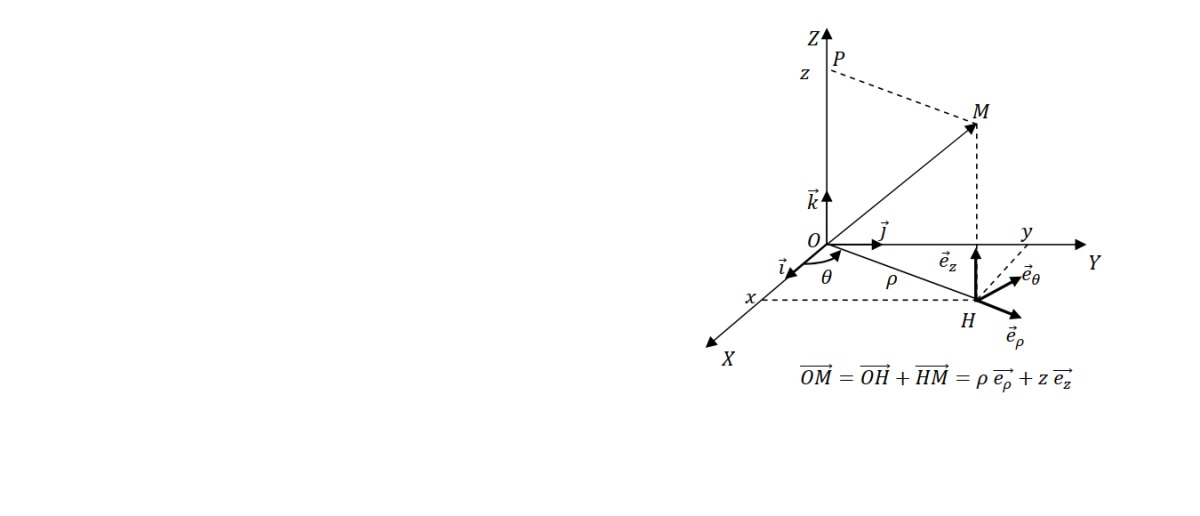
-Base locale associée aux coordonnées cylindriques :
est la base locale associée aux coordonnées cylindriques, c'est une base orthonormée directe.
Dans cette base le vecteur position s'écrit :
- Correspondance avec les coordonnées cartésiennes
II- 6.4. Coordonnées sphériques :
Soit un point M dans le repère orthonormé direct de la base cartésienne (𝑂, 𝑖, 𝑗, 𝑘⃗ ) qui se déplace selon un système sphérique d'où le repère en
coordonnées sphériques est défini par :(𝑟, 𝜃, 𝜑).
la composante radiale
Le vecteur position 𝑂𝑀 ⃗⃗⃗⃗⃗⃗ est définie par : 𝑟(𝑡), 𝜃(𝑡), 𝜑(𝑡).
En utilisant les relations entre les vecteurs (𝑢 ⃗⃗⃗⃗𝑟 , 𝑢 ⃗⃗⃗⃗𝜃 , 𝑢 ⃗⃗⃗⃗𝜑⃗ ) :
Le déplacement élémentaire est défini par :
Dérivons le vecteur position en coordonnées sphériques par rapport au temps en trouve le vecteur vitesse
En remplaçant Uθ Uφ dans l'équation de la vitesse 𝑣, on obtient.
𝑣 = 𝑟̇ 𝑢⃗⃗⃗⃗𝑟 + 𝑟 𝜃̇ 𝑢 ⃗⃗⃗⃗𝜃 + (𝑟𝑠𝑖𝑛 𝜑̇) ⃗𝑢⃗⃗⃗𝜑⃗
Alors les trois composantes du vecteur vitesse apparaissent comme suit :
𝑣 = 𝑣⃗⃗⃗𝑟 + 𝑣 ⃗⃗⃗⃗𝜃 + ⃗𝑣⃗⃗𝜑⃗ ⟹ 𝑣 =𝑑𝑟/𝑑𝑡 𝑢 ⃗⃗⃗⃗𝑟 + 𝑟𝑑𝜃/𝑑𝑡 𝑢 ⃗⃗⃗⃗𝜃 + 𝑟𝑠𝑖𝑛𝜃𝑑𝜑/𝑑𝑡 ⃗𝑢⃗⃗⃗𝜑
La base orthogonale directe est constituée des vecteurs (𝑢 ⃗⃗⃗⃗𝑟 , 𝑢 ⃗⃗⃗⃗𝜃 , 𝑢 ⃗⃗⃗⃗𝜑⃗ ) qui dépendent de la position du mobile qui peut être déterminé à partir des équations
horaires r (t), θ (t), φ(t), ce qui nous permet d'établir les composantes 𝑣𝑟, 𝑣𝜃 , 𝑣𝜑 en coordonnée sphériques du vecteur vitesse.
En dérivant toujours l'expression du vecteur vitesse, on obtient l'accélération :
𝑎 =𝑑𝑣/𝑑𝑡 =𝑑/𝑑𝑡 [𝑟̇𝑢 ⃗⃗⃗⃗𝑟 + (𝑟𝑠𝑖𝑛𝜑)𝜃̇𝑢 ⃗⃗⃗⃗𝜃 + 𝑟𝜑̇ 𝑢 ⃗⃗⃗⃗𝜑⃗ ]