Mouvements d’un corps rigide et transformations homogènes
Introduction
Pour le développement des équations cinématiques du robot manipulateur, il est nécessaire d'établir plusieurs systèmes de coordonnées pour représenter les positions et les orientations de corps rigides. Il est également nécessaire de connaître les transformations de coordonnées entre ces systèmes, afin que les vecteurs représentant des positions, des vitesses et des accélérations, donnés dans un système de coordonnées donné, puissent être représentés dans d'autres systèmes de coordonnées. Dans ce chapitre, nous étudierons les opérations de rotation et de translation entre systèmes de coordonnées tridimensionnelles, en introduisant le concept de transformations homogènes [ 3[1]]
Complément :
L'ordre relatif des axes est donné par la règle de la main droite, illustrée dans le tableau suivant
Règle de la main droite pour la formation de systèmes de coordonnées 3D. Le pouce correspond à l’axe des z, l’indicateur à l’axe des x et le majeur à l’axe des y
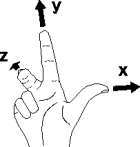
Règle de la main droite : la direction des doigts qui se ferment dans la main indique le sens positif de l'angle de rotation.

Matrice de rotation plane
Soit deux repères orthonormés directs partageant la même origine : et . On effectue une transformation amenant R1 vers R2 : rotation d’un angle θ autour de l’axe x puis on exprime le repère R2 dans le repère R1 :
· Rotation (z1,α)
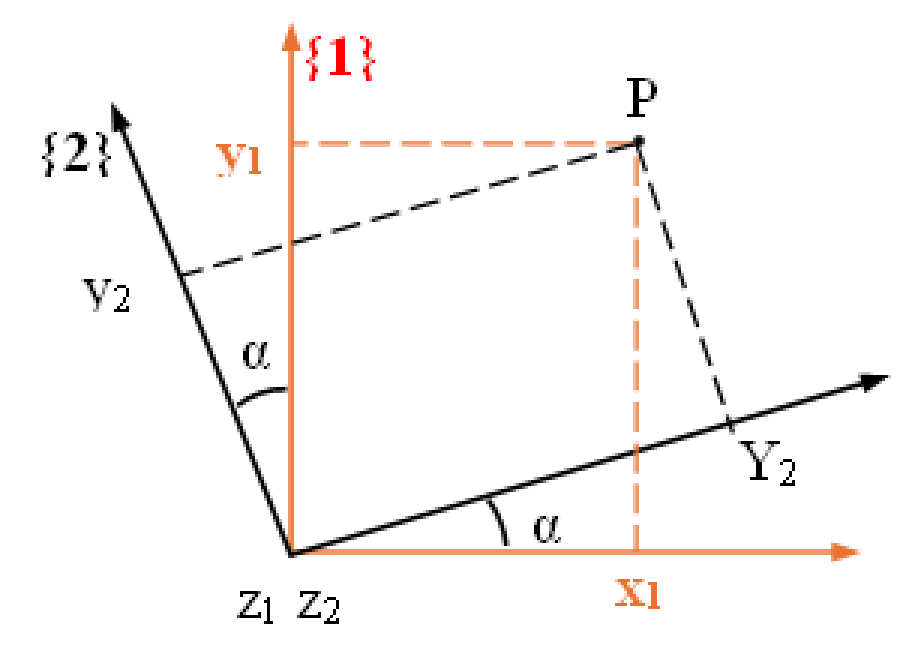
Cette matrice est appelée matrice de rotation, matrice de passage ou matrice de changement de base, Il est possible de définir d'autres rotations rapport aux axes x et y comme suit:
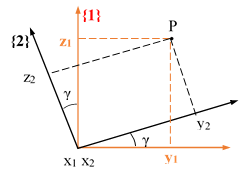
· Rotation (y1,β)
· Rotation (x,γ)
Remarque :
Orientation déterminée par trois angles :
On peut exprimer les trois ddl de rotation de R3 par rapport à R0 par trois angles. Pour se faire, on définit ayant même origine que R0 . R3 peut se déduire de R0 par trois rotations successives, en définissant deux repères intermédiaires R1 et R2.
La première rotation fait passer de R0 à R1 la seconde de R1 à R2 et la troisième de R2 à R3 . Ces trois rotations peuvent alors être définies de différentes manières (à condition que deux rotations consécutives ne soient pas autour du même axe).
Angles d’Euler
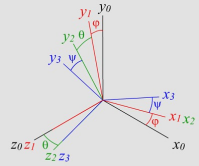
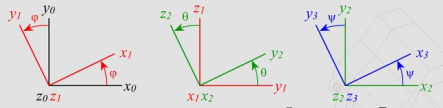
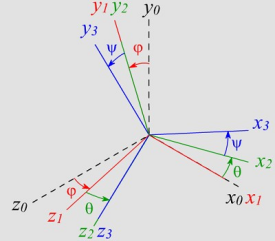
Les angles d’Euler définissent les trois rotations suivantes :
− la précession φ, autour de l’axe z0 fait passer de R0 à R1
− la nutation θ, autour de l’axe x1 , fait passer de R1 à R2
− la rotation propre ψ, autour de l’axe, z2 fait passer de R2 à R3.
La transformation entre R0 et R3 définie par les angles d’Eleur s’écrit donc :
− Rotation autour de l’axe z0 d’un angle φ fait passer de R0 à R1 :
− Rotation autour de l’axe x1 d’un angle θ fait passer de R1 à R2
− Rotation autour de l’axe z2 d’un angle ψ fait passer de R2 à R3
Les angles de Roulis et Tangage et Lacet
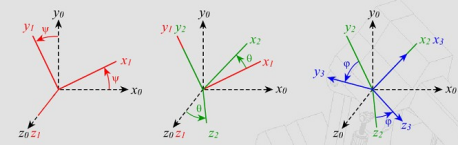
Ces angles, appelés également angles aéronautiques sont très utilisés dans le domaine industriel. A la différence des angles d’Eleur, ces trois rotations s’effectuent par rapport à un référentiel fixe. L’orientation du repère R3 dans un repère R0 est donc spécifiée par trois angles : Roulis, Tangage et Lacet.
φ : Roulis : rotation autour de x0
θ : Tangage : rotation autour de y0
Ψ : Lacet : rotation autour de z0
La transformation entre R0 et R3 définie par les angles Roulis Tangage Lacet s’écrit :
Transformations homogènes
La représentation d’opérations sous forme matricielle est très intéressante pour simplifier L’écriture. Il serait intéressant de pouvoir inclure aussi les translations sous forme matricielle.
Pour faire cela on introduit les coordonnées homogènes. Il s’agit de former une matrice 4x4 avec la matrice orientation et le vecteur position.
Où :
Matrice (3×3) des rotations donnant l’orientation de Rj dans Ri
Matrice (3×1) des translations donnant la position de l’origine du repère Rj dans Ri
Matrice de transformation homogène de translation pure
Lorsque deux repères sont uniquement liés par une translation, il est possible de passer de l’un à l’autre en utilisant une matrice de transformation homogène de translation pure. Soit deux repères Ri et Rj de même base, ayant comme origines, les deux points Oi et Oj respectivement.Considérons une translation composée de :
− d’une translation a selon l’axe x
− d’une translation b selon l’axe y
− d’une translation c selon l’axe z
Cette translation est exprimée par :
Transformation par rapport à un référentiel mobile
Soit les deux référentiels Ra et Rb . Puisque nous allons considérer que nous connaissons la
description du référentiel Rb par rapport au référentiel Ra , c’est-à-dire la matrice de transformation homogène , nous pouvons considérer le référentiel Ra comme étant fixe et le référentiel Rb comme étant mobile.
La description d’un référentiel Rc par rapport au référentiel Ra, obtenue en appliquant une
Transformation T par rapport au référentiel Rb est définie par:
Transformation par rapport au référentiel fixe
On cherche à trouver la description, par rapport au référentiel Ra , d’un référentiel
Rc obtenu en appliquant une transformation T par rapport au référentiel Ra. Cette
description est définie par: