Classification des robots suivant leur structure cinématique
On peut aussi classer les robots suivant leur configuration géométrique, autrement dit l’architecture de leur porteur. Les 3 premiers ddm d’un robot peuvent être réalisés avec un grand nombre de combinaisons de translations (max. 3T) et de rotations (max. 3R), autrement dit par des articulations prismatiques (P) ou rotoïdes (R) ; en pratique, on n’utilise que 4 ou 5 d’entre elles:
Robots cartésiens
3 articulations prismatiques dont les axes sont typiquement mutuellement orthogonaux (PPP), 3 ddL
− La structure cartésienne offre une très bonne rigidité mécanique et une grande précision
− Utilisation typique: manutention et assemblage
− Actionneurs: généralement électriques, parfois pneumatiques
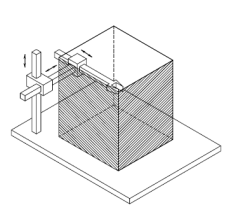
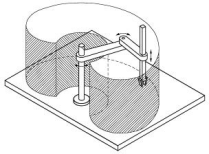
Robots cylindriques
− La géométrie cylindrique diffère de la géométrie cartésienne en ce que la 1ère articulation prismatique est remplacée par une articulation rotoïde (RPP); 3 ddL
− La structure cylindrique offre une très bonne rigidité mécanique
− Utilisation typique: transport d’objets, même de grande taille (dans un tel cas, des moteurs hydrauliques sont préférés aux moteurs électriques).
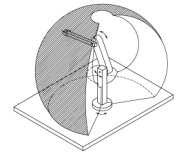
Robots sphérique
− La géométrie sphérique diffère de la géométrie cylindrique en ce que la 2ème articulation, prismatique est remplacée par une articulation
prismatique est remplacée par une articulation rotoïde (RRP); 3 ddL
− La rigidité mécanique est inférieure à celle des deux robots précédents et la construction mécanique est plus complexe.
− Utilisation typique: usinage
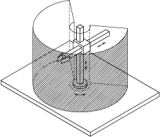
Manipulateur SCARA
SCARA[1]: Selective Compliance Assembly Robot Arm
− Manipulateur sphérique à géométrie “spéciale”
− Deux articulations rotoïdes et une articulation prismatique (RRP): tous les axes sont parallèles; 3 ddL Rigidité élevée pour charges verticales et souplesse aux charges horizontales
− Bien adapté à des tâches de montage vertical et à la manipulation de petits objets
− Précis et très rapide (1er modèle: 1981)
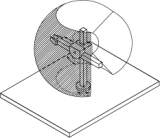
Robots anthropomorphe
− Trois articulations rotoïdes (RRR): l’axe de la 1ère articulation est orthogonale aux axes des deux autres qui sont parallèles; 3 ddL
− En raison de sa ressemblance avec le bras humain, la 2ème articulation est appelée l'articulation de l'épaule et la 3ème, l'articulation du coude puisqu’elle relie le bras avec l'avant-bras.
− Manipulateur le plus agile car tous les articulations sont rotoïdes
− Grand volume de travail par rapport à l’encombrement du robot