Constituants d'un robot
Un robot manipulateur est constitué généralement d'un système mécanique articulé et d'un ensemble
d'organe associés .
On distingue généralement 4 parties principales On distingue généralement 4 parties principales
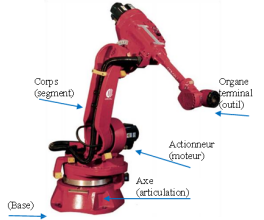
Le système mécanique articulé
Le système mécanique articulé (SMA[1]) est un mécanisme ayant une structure plus ou moins proche de celle du bras humain. Il permet de remplacer, ou de prolonger, son action (le terme "manipulateur" exclut
implicitement les robots mobiles autonomes). Son rôle est d'amener l'organe terminal dans une situation (position et orientation) donnée, selon des caractéristiques de vitesse et d'accélération données. Son architecture est une chaîne cinématique de corps, généralement rigides (ou supposés comme tels), assemblés par des liaisons appelées articulations. Sa motorisation est réalisée par des actionneurs électriques, pneumatiques ou hydrauliques qui transmettent leurs mouvements aux articulations par des systèmes appropriés (transmetteurs) [ 2[2]]
L'organe terminal
L'organe terminal, regroupe tout dispositif destiné à manipuler des objets (dispositifs de serrage, dispositifs magnétiques, à dépression, …), ou à les transformer (outils, torche de soudage, pistolet de peinture, …). En d'autres termes, il s'agit d'une interface permettant au robot d'interagir avec son environnement. Un organe terminal peut être multi-fonctionnel, au sens où il peut être équipé de plusieurs dispositifs ayant des fonctionnalités différentes. Il peut aussi être mono-fonctionnel, mais interchangeable. Un robot, enfin, peut-être multi-bras, chacun des bras portant un organe terminal différent. On utilisera indifféremment le terme organe terminal, préhenseur, outil ou effecteur pour nommer le dispositif d'interaction fixé à l'extrémité mobile de la structure mécanique
L'articulation
L'articulation lie deux corps successifs en limitant le nombre de degré de liberté de l'un par rapport à l'autre. Soit m le nombre de degré de liberté résultant, encore appelé mobilité de l'articulation. La
mobilité d’une articulation est telle que : 0 ≤ m ≤ 6 . Lorsque m = 1 ; ce qui est fréquemment le cas en robotique, l'articulation est dite simple : soit rotoïde, soit prismatique.
Articulation rotoïde
Il s'agit d'une articulation de type pivot, notée R, réduisant le mouvement entre deux corps à une rotation autour d'un axe qui leur est commun. La situation relative entre les deux corps est donnée par l'angle autour de cet axe.

Articulation prismatique
Il s'agit d'une articulation de type glissière, notée P, réduisant le mouvement entre deux corps à une translation le long d'un axe commun. La situation relative entre les deux corps est mesurée par la distance le long de cet axe.

Les actionneurs
le SMA. comporte des moteurs le plus souvent avec des transmissions (courroies crantées), l'ensemble constitue les actionneurs. Les actionneurs utilisent fréquemment des moteurs électriques à aimant permanent, à courant continu, à commande par l'induit (la tension n'est continue qu'en moyenne car en général l'alimentation est un hacheur de tension à fréquence élevée ; bien souvent la vitesse de régime élevée du moteur fait qu'il est suivi d'un réducteur, ce qui permet d'amplifier le couple moteur). On trouve de plus en plus de moteurs à commutation électronique (sans balais), ou, pour de petits robots, des moteurs pas à pas. Pour les robots devant manipuler de très lourdes charges (par exemple, une pelle mécanique), les actionneurs sont le plus souvent hydrauliques, agissant en translation (vérin hydraulique) ou en rotation (moteur hydraulique). Les actionneurs pneumatiques sont d'un usage général pour les manipulateurs à cycles (robots tout ou rien). Un manipulateur à cycles est un SMA. avec un nombre limité de degrés de liberté permettant une succession de mouvements contrôlés uniquement par des capteurs de fin de course réglables manuellement à la course désirée (asservissement en position difficile dû à la compressibilité de l'air). (positions et vitesses des articulations) et extéroceptifs5 lorsqu'ils recueillent des informations sur l'environnement (détection de présence, de contact, mesure de distance, vision artificielle).
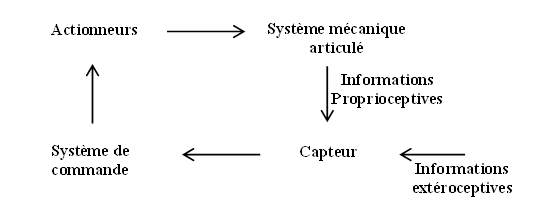
Système de commande
Le système de commande synthétise les consignes des asservissements pilotant les actionneurs, à partir de la fonction de perception et des ordres de l'utilisateur.
Les capteurs
La perception permet de gérer les relations entre le robot et son environnement. Les organes de perception sont des capteurs. On peut distinguer entre deux classes:
Les capteurs proprioceptifs
ils mesurent l'état interne du robot (positions et vitesses des articulations).
Les capteurs extéroceptifs
ils recueillent des informations sur l'environnement (détection de présence, de contact, mesure de distance, vision artificielle).