Topic outline
Présentation du cours
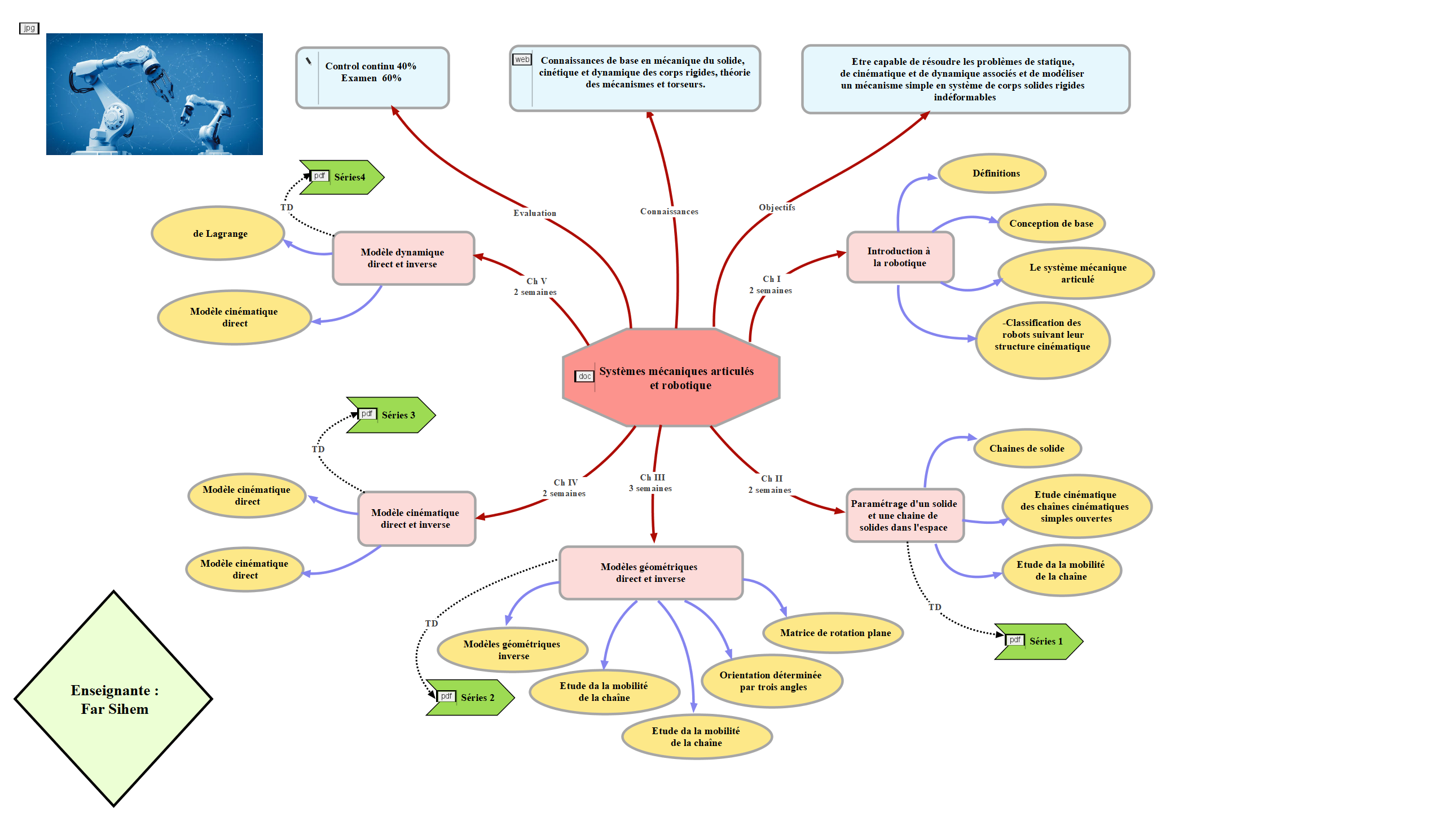
Ce cours intitulé le «Systèmes Mécaniques Articulés et Robotique», est destiné aux étudiants de Master génie mécanique spécialité construction mécanique et fabrication mécanique et Mécatronique, ainsi qu’aux étudiants de département informatique.
Pour concevoir, simuler ou commander un robot, il est nécessaire, entre autres, de disposer de modèles du mécanisme. Plusieurs niveaux de modélisation sont possibles. Ils dépendent des spécifications du cahier des charges de l'application envisagée.
L'obtention de ces différents modèles n'est pas aisée, chaque chapitre de ce cours a aussi pour but de faire progresser les connaissances et acquérir aux étudiants des démarches ou des méthodes scientifique, ou expérimentales, dans la conception des systèmes en respectant les exigences et les spécifications imposées par un cahier des charges spécifique pour une application envisagée.Carte Conceptuelle
Fiche de Contact

Faculté : Sciences de la technologie
Département : Génie de Mécanique
Public cible : 1ère année Master, spécialité Construction Mécanique
Intitulé du cours : Systèmes Mécaniques Articulés et Robotique
Crédits: 04 / Coefficient:02
Durée : 15 semaines
Horaire: Lundi: 08h00-11h00 Bloc : G
Enseignant : Far Sihem ( Cours, TD )
Contact par mail : sihem.far@univ-annaba.dz
Disponibilité : Au département : lundi, Mercredi 11h00 -12h00
Objectif Généraux du cours
A l'issue de cet enseignement d’apprentissage, l'apprenant sera capable identifier correctement les différentes caractéristiques du systèmes mécaniques articulés qui se présentent comme suit:
• Acquisition quelques concepts de base mais fondamentaux de la robotique tels que les degrés de liberté, L’espace de configuration, l'espace opérationnel.
• Comprendre les techniques de de calcul du nombre de degrés de mobilité d'un mécanisme (ou d’un robot).
• Acquisition de la capacité de passer du domaine de manipulation des objets dans l'espace représentés en aux applications de modèle mathématique des matrices de transmission homogènes.
• Devenir capable d’analyser un Système mécanique articulé par la méthode Denavit-Hartenberg DH
• Structurer et organiser le reste de contenu après avoir identifié les savoirs à utiliser en déterminant le modèle géométrique jusqu’à l’obtention des model cinématique et dynamique.
Pré-requis
Afin de maximiser le développement de vos connaissances dans ce domaine l’étudiant doit avoir :
· Connaissances de base en mécanique du solide, cinétique et dynamique des corps rigides, théorie des mécanismes et torseurs.
· les principales opérations réalisées sur les vecteurs, les coordonnées cartésiennes d’un vecteur et la notion de vecteur-position.
· les outils mathématiques adaptés.

Si la note obtenue est insuffisante, vous serez orienté vers le cours et la vidéo de prés-requis ci dessous:
Table de matière
Introduction
Objectifs
Pré-requis
Chapitre I : Introduction à la robotique
Chapitre II : Paramétrage d'un solide et une chaine de solides dans l'espace
Chapitre III : Modèles géométriques direct et inverse
Chapitre IV : Modèles cinématiques direct et inverse
Chapitre V : Modélisation dynamique (Formalisme de Lagrange, Formalisme de Newton-Euler)
Chapitre VI : Génération de mouvement
Chapitre VII : Initiation à la robotique médicale et d'assistance aux personnes à mobilité réduit
Mini-projet : Modélisation d'un robot pour une tâche précise, détermination de l'espace de travail et placement optimal d'un robot
Chapitre I : Introduction à la robotique
L'objectif de ce chapitre :
Test de sortie
Ce test entre dans le cadre de l’évaluation de l’atteindre des objectifs du cours.
Bibliographie
Références bibliographiques
- Fadhila_LACHEKHAB «Contribution à la commande des systèmes robotisés » Thèse de doctorat en
- Robotique ISTIA, Université Angers Jean-Louis Boimond
- Modeling, Identification & Control of Robots, W. Khalil, E. Dombre, Hermes Penton Science 2002
